
Charting New Waters: Students and Startups are Creating Robotic Vessels
Ella Knowles started working on boats when she was a kid, helping her father—an aircraft maintenance engineering instructor—with his San Juan 23 keelboat.
“Although sailing is very much a sport, there’s a lot of technical aspects: using your sail to catch the wind and aerodynamics,” she says. “That sparked my scientific, engineering interest.”
Now, as a third-year mechanical engineering student, Knowles serves as the mechanical lead on UBC Sailbot, an engineering club at the University of British Columbia. The club designs, builds, and launches autonomous sailboats, which are unmanned vessels that can be operated by a variety of systems including robotics, artificial intelligence, and solar panels.

The club started in 2005 as an engineering capstone project, says Asvin Sankaran, a fourth-year engineering physics student and UBC Sailbot co-captain. Now, the undergraduate club has developed three vessels, creating and exploring new challenges with each sailboat. Their 5.5-metre vessel, Ada, which was launched in 2016, was created to attempt a trans-Atlantic voyage from Newfoundland to Ireland with no human assistance or feedback.
“All was going well for around the first third of the trip until she hit hurricanes, which we definitely didn’t plan for,” says Sankaran. “The rudder completely broke and the windsurfing sail was ripped out of the hull.”
Ada kept up communication with the team back in Vancouver for a few months before going completely off the grid. A year later, she was picked up off the coast of Florida by a shipping vessel and sent back to UBC, where the Sailbot team analyzed what went wrong.
“It constituted a really unique opportunity to see a project from start to finish to failure, and then get to [try again] with the next boat,” says Sankaran.
That next boat was Raye, another 5.5-metre sailboat, which was set to sail the Pacific Ocean in the summer of 2022. The team didn’t get to send her off to Hawaii—their ultimate goal for the vessel—and she was retired in 2023, but Sankaran says they are happy to have proved that undergraduates are capable of devising such an ambitious project.




2: Testing Raye on land to check if the sensors, motors, and computer are communicating correctly. 3. To build Raye’s hull, layers of carbon fibre are placed on top of a foam and wood mold called a “wet layup,” which is then covered with a layer of expoxy-infused carbon fibre. 4: Smoothing out Raye’s carbon fiber hull with sandpaper to get it ready for painting. Courtesy of UBC Sailbot.
Now, the team is working on their next vessel, Polaris, a three-metre, fully autonomous sailboat they intend to be capable of collecting oceanic and atmospheric data in the Pacific.
“We as a team, and as students, felt that we could do so much more with the technology that we were pursuing,” says Sankaran. “Because we have the support of the university, we are able to pursue such ambitious projects without having to face as many adverse risks as if you were, say, a startup company dealing with money, dealing with legalities; that’s something that the university helps us with tremendously.”

The team has been working on Polaris for about a year now, and Knowles says they are wrapping up the design stage.
“We spent the last year testing in the wind tunnel and using simulation software to optimize our design,” she says. “Now we’re ordering materials and prototyping and getting ready to start building our main final products.”
With construction starting, Polaris is set to make her maiden voyage in the summer of 2025. Unlike the team’s previous vessels, she will have a hard wingsail, a rigid type of sail similar to an airplane wing turned vertically, which will provide lift and propel Polaris forward. The sides of the wingsail will be covered in solar panels, which will power the boat. Solar panels will also be mounted on the deck, and additional space for sensors and batteries.
On a non-autonomous sailboat, the crew is able to look at the sail and see how full it is, monitor wind direction and speed, and consider everything else that must be taken into account when plotting a course. In the case of an autonomous sailboat, it’s the algorithms developed by the software team that make these calculations.
“As you can imagine, it’s an incredibly complex system and an incredibly complex project,” says Sankaran. “Trying to merge classical naval architecture and marine engineering on the left with software and robotic systems on the right, and electrical systems being the middle person talking between the two, is really challenging.”
Because Polaris will be collecting ocean data, which the UBC Sailbot’s research team will work to give context to and interpret accurately, the hope is to use what they find to support efforts of ocean conservation, according to Sankaran. How they do that will depend on the data they find.
There are very few autonomous sailboats in existence, so the UBC Sailbot team is voyaging into mostly uncharted waters with little prior research to guide them.
“I think that gives [the team] a lot of room for research, but it also gives us a lot of room for innovation. There’s no way that we can copy somebody else’s design. We have to propose our own designs from scratch. That gives us a lot of freedom in how we pursue our projects.”
As undergraduate students, being involved with such a hands-on project has allowed Knowles and Sankaran to learn new skills and go far beyond what they would be taught in the classroom—at UBC, naval architecture is only offered at the master’s level.
“I joined the team as a first-year student with only my sailing experience behind me and not a lot of engineering analysis skills,” says Knowles. “Joining the team and being connected with upper years … had me learning content way before I was learning it in class. And having the ability to take what you’re learning in class and apply it to a project is something that is very valuable.”
Outside the world of the university, startups are developing their own robotic vessels for data collection. One such company is Victoria-based Open Ocean Robotics, which created the DataXplorer, an uncrewed surface vehicle (USV) about the size of a paddleboard. Powered by solar panels, the DataXplorer is designed for ocean monitoring and data collection in a way that is more affordable and less risky than traditional crewed vessels.
While the DataXplorer is not yet fully autonomous, Open Ocean Robotics Lead Data Scientist Oliver Kirsebom says the organization is working towards the vessels being able to navigate the water safely on their own. At the moment, DataXplorers are monitored by human operators who can control the vessels remotely, although the USVs follow their planned routes mostly autonomously.

DataXplorers are equipped with both visual and thermal cameras, whose feeds they can stream to human operators in near-real time, and that can collect data on conditions like wind speed and air temperature. Madeleine Bouvier-Brown, the company’s Marine Operations Lead, works on launching and recovering the USVs, creating mission plans, working with clients, and monitoring the vessels when they’re out on the water.
“As the operator, you’re often just sitting there being like, ‘Everything OK? Are you still on your mission? OK, great, I’ll just let you do your thing.’” says Bouvier-Brown. “And that does require you to pay attention. But it doesn’t necessarily mean that you’re intervening.”
When the vessels are farther offshore, and out of range of cellular service, they are no longer able to stream camera footage to operators. For situations like this, Kirsebom has been training artificial intelligence algorithms for the USVs to detect other vessels and avoid collisions on their own. This kind of autonomous detection is also important for monitoring purposes, like the collaboration Open Ocean Robotics is working on with the coast guard in the Bahamas.
“We will have three boats on the water down there very soon , keeping an eye out for illegal fishing—and not only an eye, but an ear as well,” says Kirsebom. “In addition to the cameras, we’ll also have a hydrophone deployed from each of these boats, and so we’ll be able to listen for the noise that the vessels make.”
Hydrophones, or underwater microphones, can be towed by the USVs to collect sound data for many potential applications. Bouvier-Brown—who has a background in whale research and bio-acoustics—was initially hired by Open Ocean Robotics to collaborate on a project with the Department of Fisheries and Oceans Canada. The idea was to assess the critical habitat of the endangered southern resident killer whales using hydrophones attached to USVs.
“I had only ever worked with seafloor-mounted hydrophones that were digital and did near-real time streaming, so this was quite different, because now we could move the hydrophones to wherever we wanted,” says Bouvier-Brown. “If you thought ‘Oh, maybe [the whales] will be over here today,’ you could just drive the USV there, and then let it sit and listen. If you wanted to do multiple passes, you could just keep moving the USV back and forth.”
Unlike larger, crewed vessels, the DataXplorer is small and unobtrusive, moves slowly, and produces almost no noise, meaning it causes minimal disturbance to marine mammals.
“This is a way to have a positive impact on the oceans and to learn more about what it means and what it’s going to take for us to conserve them without actually impeding these animals or habitats,” says Bouvier-Brown. “It’s the best of both worlds of getting that research, getting that data, helping them, but then also not hindering them by trying to help them.”
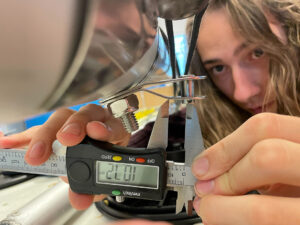

Left: A team member uses calipers to measure. Courtesy of UBC Sailbot. Right: A DataXplorer being dragged onto the shore. Courtesy of Charmaine Suveges
In the future, the USVs could be used to listen for marine mammals in real time, for example to alert ships when whales are nearby to prevent collisions.
Outside of supporting marine mammal conservation, the USVs can also be used for patrolling borders, mapping the seafloor, and monitoring the impacts of projects such as offshore wind farms and ocean-based carbon capture and storage, among many other applications.
Like Knowles and Sankaran say about working on their autonomous sailboat, Kirsebom says it’s an exciting challenge to work on the DataXplorer. For example, since they are powered exclusively by solar energy, these vessels have a tight power limit. While the batteries are able to recharge while the boats are out on the water, he says caution must be taken for how much power they use.
“We want to be able to do all of these things with our little computer on the boat, but at the same time, we don’t have infinite power to do it,” says Kirsebom. “It’s a fun challenge for me as a data scientist to develop these AI algorithms while making sure that they’re not too big, and not too power hungry.”
In working on such new technology, another puzzle Kirsebom faces is to figure out which data the vessel should transmit to operators on the shore, as sending data is expensive. When the algorithm has made a potential detection of a vessel or marine mammal, Kirsebom must figure out what evidence it should send to operators so they can decide if it’s a real detection.
“As one of several companies worldwide that are developing these types of ocean drones,” says Kirsebom, “we’re breaking new ground here. It’s really a growing market at the moment.”
For Bouvier-Brown, the future of ocean science—and many other fields—is autonomous but that doesn’t mean robot boats will be taking people’s jobs.
“The beauty of working with USVs, and with all these different advancing technologies, is that the jobs are just going to become different, but we’re still going to be lowering our impact on the environment, and really lowering our risks to human life,” she says. “The ocean is one of the most dangerous places in the world, especially the open ocean. Being able to send a vessel out there that can still collect all this data and do all these things that a crewed vessel can do, but do it more affordably, safely, and with multiple vehicles at once, is really a game changer.”
In the future, Bouvier-Brown says, maybe we’ll see a new generation of smarter, safer marine technologies—from ocean drones to sailbots—all working together to collect and share data to help conserve our oceans.